MRP2
Mobile Research Platform
MRP2 is offered to the users ready for programming with advanced features which incorporates all the features that a researcher can expect from a mobile robot platform.
The computer on the robot is easily accessible and software development can be done quickly. The robot can easily do mapping with its already available navigation software and can position itself on the map with a few centimeters accuracy. MRP2, with its powerful hardware and software infrastructure, enables users to make developments quickly and comfortably.
Key Features
ROS Ready
ROS is pre-installed and configured. Simulation model is ready for Gazebo. Supports Open Source.Customizable
You can choose and buy your MRP2 robot customized depending on your applications.Full Perception
Can perceive its environment via different sensors like laser, ultrasonic, inertial sensors and cameras.Compact & Robust Design
Has robust chassis design and can handle large payloads with its compact size.Support & Training
We, as robot experts, are here to support your application even in your facility.Tele-Operable
You can teleoperate the robot with a joystick.Extendable
Additional hardware can be mounted and integrated easily using mounting holes and connection ports.Navigation Ready
Autonomous navigation package is configured and ready to use out-of-the-box.Long Operation Time
Robot can operate 12 hours in normal usage without interrupting your research.Technical Info
| Mechanical | |
|---|---|
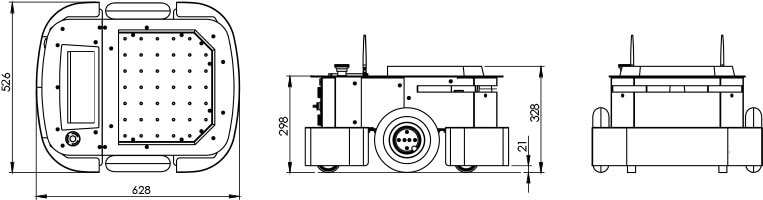
| Dimensions | 628 x 526 x 298 mm |
| Weight | 24 kg |
| Maximum Payload | 25 kg |
| Drive | Differential |
| Motorized wheels | 2 |
| Caster wheels | 4 |
| Maximum Speed | 1 m/s |
| Turning Radius | 0 mm |
| Traversable Gap | 20 mm |
| Traversable Sill | 10 mm |
| Power | |
|---|---|
| Battery | 24V Li-Ion |
| Capacity | 20 Ah |
| Power Output | 12V (2A, requlated), 24V (5A, unregulated) |
| Run Time | 6-8 Hours |
| Charge Time | 3 Hours |
| Sensors | |
|---|---|
| 2D Distance | SICK TIM510 |
| Encoders | |
| Inertial | 9-DOF IMU |
| Hardware | |
|---|---|
| Processor | Intel® i5 Broadwell |
| Memory | 8 GB |
| Storage | 120 GB SSD |
| Connection | WiFi, USB |
| Interface | 3x USB 3.0, 1x HDMI, 4x Digital Input, 4x Digital Output |
| Software | |
|---|---|
| Operating System | Ubuntu 16.04 LTS |
| Middleware | ROS Kinetic Kame |
Gallery



