MRP2
MRP2, araştırma ve geliştirme faaliyetlerinde kullanılmak amacı ile tasarlanmış, bir mobil robot platformundan beklenebilecek tüm gelişmiş donanımsal özelliklere sahip ve programlamaya hazır bir şekilde kullanıcılara sunulmaktadır.
Robotun içinde kolayca erişilebilen ve yazılım geliştirmeye hazır halde entegre bir bilgisayar bulunmaktadır. Bu entegre bilgisayar içinde halihazırda mevcut olan navigasyon yazılımı ve robot üzerinde yer alan lazer sensörü sayesinde robot ile kolayca bulunduğu ortamın haritası çıkarılabilir. Bu yazılım paketi sayesinde, robot birkaç santimetre hassasiyetle iç ortamda konumlanabilir ve çıkarmış olduğu harita üzerinde bir noktadan başka bir noktaya hareketini sağlayabilir. MRP2, sahip olduğu güçlü donanım ve yazılım altyapısı ile kullanıcıların hızlı ve rahat bir şekilde geliştirme yapmalarını sağlar.
Başlıca Özellikler
ROS Uyumlu
ROS yüklü olarak gelir. Gazebo simülasyon modeli mevcuttur. Açık kaynak kod destekler.Özelleştirilebilir
Uygulamanıza göre farklı özelliklerde bir MRP2 robotu seçebilirsiniz.Çevre Algılama
Lazer, ultrasonik, atalet sensörleri ve kameralar ile çevresini tam olarak algılayabilir.Kompakt ve Sağlam Tasarım
Kompakt ve sağlam şase tasarımı ile ağır yükleri de kolaylıkla taşıyabilir.Teknik Destek ve Eğitim
Konunun uzmanlarından gerekli olması durumunda sahada destek.Uzaktan Kontrol
Kablosuz gamepad ile uzaktan kontrol edilebilir.Genişletilebilir
Bağlantı delikleri ve konektörler sayesinde kolayca ek donanım bağlanabilir.Navigasyona Hazır
Otonom navigasyon paketi kullanıma hazır bir şekilde ayarlanmış olarak gelir.Uzun Çalışma Süresi
Aralıksız 12 saat kullanıma olanak sağlayan bataryaya sahiptir.Teknik Özellikler
| Mekanik | |
|---|---|
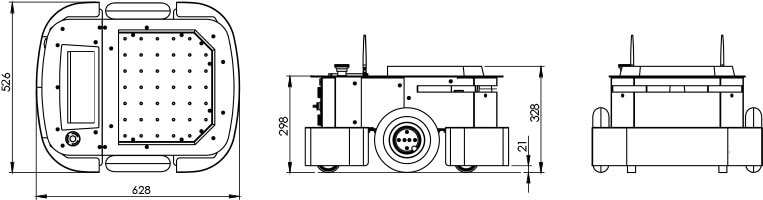
| Boyutlar | 628 x 526 x 298 mm |
| Ağırlık | 24 kg |
| Taşıma Kapasitesi | 25 kg |
| Sürüş Sistemi | Diferansiyel |
| Motorlu Tekerlek Sayısı | 2 |
| Avare (Destek) Tekerlek Sayısı | 4 |
| Maksimum Hız | 1 m/s |
| Dönme Yarıçapı | 0 mm |
| Geçebileceği Boşluk | 20 mm |
| Geçebileceği Yükseklik | 10 mm |
| Güç | |
|---|---|
| Batarya | 24V Li-Ion |
| Kapasite | 20 Ah |
| Güç Çıkışı | 12V (2A, regüle), 24V (5A, regüle değil) |
| Çalışma Süresi | 6-8 saat (yük ile) |
| Şarj Süresi | 3 saat (%30 - %95) |
| Sensörler | |
|---|---|
| 2D Mesafe | SICK TIM510 |
| Enkoder | 1024 pulse / rev |
| Atalet | 9-DOF IMU |
| Donanım | |
|---|---|
| İşlemci | Intel® i5 Broadwell |
| Bellek | 8 GB |
| Depolama | 120 GB SSD |
| Bağlantı | WiFi, USB |
| Arayüz | 3x USB 3.0, 1x HDMI, 4x Dijital Giriş, 4x Dijital Çıkış |
| Yazılım | |
|---|---|
| İşletim Sistemi | Ubuntu 18.04 LTS |
| Ara Yazılım | ROS Melodic Morenia |
Galeri



